
{kind=link}
[ad_1]
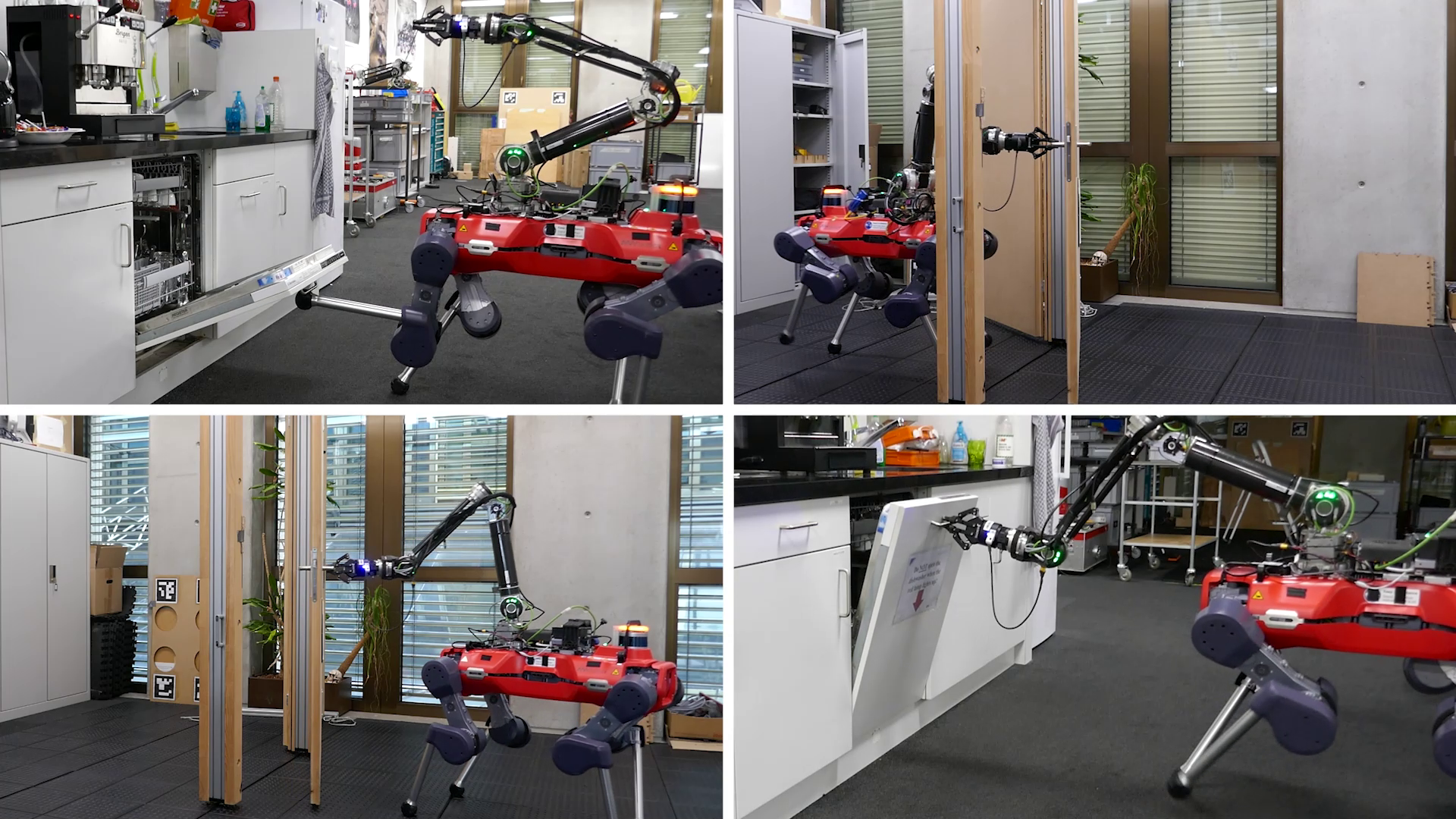
Image from paper “Versatile multicontact planning and management for legged loco-manipulation“. © American Affiliation for the Development of Science
We had the prospect to interview Jean Pierre Sleiman, creator of the paper “Versatile multicontact planning and management for legged loco-manipulation”, lately revealed in Science Robotics.
What’s the matter of the analysis in your paper?
The analysis matter focuses on growing a model-based planning and management structure that permits legged cellular manipulators to sort out numerous loco-manipulation issues (i.e., manipulation issues inherently involving a locomotion aspect). Our examine particularly focused duties that will require a number of contact interactions to be solved, quite than pick-and-place functions. To make sure our method just isn’t restricted to simulation environments, we utilized it to unravel real-world duties with a legged system consisting of the quadrupedal platform ANYmal outfitted with DynaArm, a custom-built 6-DoF robotic arm.
May you inform us in regards to the implications of your analysis and why it’s an attention-grabbing space for examine?
The analysis was pushed by the will to make such robots, particularly legged cellular manipulators, able to fixing quite a lot of real-world duties, comparable to traversing doorways, opening/closing dishwashers, manipulating valves in an industrial setting, and so forth. A typical method would have been to sort out every activity individually and independently by dedicating a considerable quantity of engineering effort to handcraft the specified behaviors:
That is sometimes achieved by using hard-coded state-machines wherein the designer specifies a sequence of sub-goals (e.g., grasp the door deal with, open the door to a desired angle, maintain the door with one of many ft, transfer the arm to the opposite facet of the door, go by the door whereas closing it, and many others.). Alternatively, a human skilled could exhibit how one can remedy the duty by teleoperating the robotic, recording its movement, and having the robotic study to imitate the recorded habits.
Nonetheless, this course of may be very gradual, tedious, and susceptible to engineering design errors. To keep away from this burden for each new activity, the analysis opted for a extra structured method within the type of a single planner that may robotically uncover the required behaviors for a variety of loco-manipulation duties, with out requiring any detailed steering for any of them.
May you clarify your methodology?
The important thing perception underlying our methodology was that the entire loco-manipulation duties that we aimed to unravel will be modeled as Job and Movement Planning (TAMP) issues. TAMP is a well-established framework that has been primarily used to unravel sequential manipulation issues the place the robotic already possesses a set of primitive expertise (e.g., choose object, place object, transfer to object, throw object, and many others.), however nonetheless has to correctly combine them to unravel extra advanced long-horizon duties.
This angle enabled us to plan a single bi-level optimization formulation that may embody all our duties, and exploit domain-specific data, quite than task-specific data. By combining this with the well-established strengths of various planning strategies (trajectory optimization, knowledgeable graph search, and sampling-based planning), we had been capable of obtain an efficient search technique that solves the optimization downside.
The principle technical novelty in our work lies within the Offline Multi-Contact Planning Module, depicted in Module B of Determine 1 within the paper. Its general setup will be summarized as follows: Ranging from a user-defined set of robotic end-effectors (e.g., entrance left foot, entrance proper foot, gripper, and many others.) and object affordances (these describe the place the robotic can work together with the article), a discrete state that captures the mixture of all contact pairings is launched. Given a begin and aim state (e.g., the robotic ought to find yourself behind the door), the multi-contact planner then solves a single-query downside by incrementally rising a tree through a bi-level search over possible contact modes collectively with steady robot-object trajectories. The ensuing plan is enhanced with a single long-horizon trajectory optimization over the found contact sequence.
What had been your important findings?
We discovered that our planning framework was capable of quickly uncover advanced multi- contact plans for numerous loco-manipulation duties, regardless of having offered it with minimal steering. For instance, for the door-traversal situation, we specify the door affordances (i.e., the deal with, again floor, and entrance floor), and solely present a sparse goal by merely asking the robotic to finish up behind the door. Moreover, we discovered that the generated behaviors are bodily constant and will be reliably executed with an actual legged cellular manipulator.
What additional work are you planning on this space?
We see the offered framework as a stepping stone towards growing a totally autonomous loco-manipulation pipeline. Nonetheless, we see some limitations that we purpose to handle in future work. These limitations are primarily related to the task-execution part, the place monitoring behaviors generated on the idea of pre-modeled environments is barely viable underneath the idea of a fairly correct description, which isn’t at all times easy to outline.
Robustness to modeling mismatches will be tremendously improved by complementing our planner with data-driven strategies, comparable to deep reinforcement studying (DRL). So one attention-grabbing course for future work could be to information the coaching of a strong DRL coverage utilizing dependable skilled demonstrations that may be quickly generated by our loco-manipulation planner to unravel a set of difficult duties with minimal reward-engineering.
Concerning the creator

|
Jean-Pierre Sleiman acquired the B.E. diploma in mechanical engineering from the American College of Beirut (AUB), Lebanon, in 2016, and the M.S. diploma in automation and management from Politecnico Di Milano, Italy, in 2018. He’s at present a Ph.D. candidate on the Robotic Methods Lab (RSL), ETH Zurich, Switzerland. His present analysis pursuits embrace optimization-based planning and management for legged cellular manipulation. |

Daniel Carrillo-Zapata
was awared his PhD in swarm robotics on the Bristol Robotics Lab in 2020. He now fosters the tradition of “scientific agitation” to interact in two-way conversations between researchers and society.
Daniel Carrillo-Zapata
was awared his PhD in swarm robotics on the Bristol Robotics Lab in 2020. He now fosters the tradition of “scientific agitation” to interact in two-way conversations between researchers and society.
[ad_2]